clases de maquinas complejas
Las maquinas compuestas son una union de varias maquinas simples, de forma q la salida de cada una de ellas esta directamente conectada a la entrada de la siguiente hasta consegui el efecto deseado.
Ya se sabe q las maquinas simples reducen o multiplican el trabajo, una caracteristica de la maquinas compuestas es q tienen moviemiento.
Las máquinas simples, por su parte, se agrupan dando lugar a los mecanismos, cada uno encargado de hacer un trabajo determinado. Si analizamos un taladro de sobremesa podremos ver que es una máquina compuesta formada por varios mecanismos: uno se encarga de crear un movimiento giratorio, otro de llevar ese movimiento del eje del motor al del taladro, otro de mover el eje del taladro en dirección longitudinal, otro de sujetar la broca, son formadas por diferentes piezas: ejes, palancas, muelles.etc…
Cada una de las piezas q conforman una maquina compuesta se llama OPERADOR, hay dos tipos de operadores MECANICOS y ENERGETICOS. Mecánicas: las más importantes son:
Ruedas: que permiten desplazarse
Los ejes: sirven de punto de apoyo para las ruedas
Engranajes: son rueditas detalladas que sirven para mover las ruedas
Energéticas: las más importantes son:
Los muelles, baterías o pilas: acumulan energía en movimiento
Los motores: transforman la energía en movimiento
Ya se sabe q las maquinas simples reducen o multiplican el trabajo, una caracteristica de la maquinas compuestas es q tienen moviemiento.
Las máquinas simples, por su parte, se agrupan dando lugar a los mecanismos, cada uno encargado de hacer un trabajo determinado. Si analizamos un taladro de sobremesa podremos ver que es una máquina compuesta formada por varios mecanismos: uno se encarga de crear un movimiento giratorio, otro de llevar ese movimiento del eje del motor al del taladro, otro de mover el eje del taladro en dirección longitudinal, otro de sujetar la broca, son formadas por diferentes piezas: ejes, palancas, muelles.etc…
Cada una de las piezas q conforman una maquina compuesta se llama OPERADOR, hay dos tipos de operadores MECANICOS y ENERGETICOS. Mecánicas: las más importantes son:
Ruedas: que permiten desplazarse
Los ejes: sirven de punto de apoyo para las ruedas
Engranajes: son rueditas detalladas que sirven para mover las ruedas
Energéticas: las más importantes son:
Los muelles, baterías o pilas: acumulan energía en movimiento
Los motores: transforman la energía en movimiento



MÁQUINA SIMPLES
Cuando la máquina es sencilla y realiza su trabajo en un solo paso nos encontramos ante una máquina simple. Muchas de estas máquinas son conocidas desde la prehistoria o la antigüedad y han ido evolucionando incansablemente (en cuanto a forma y materiales) hasta nuestros días.
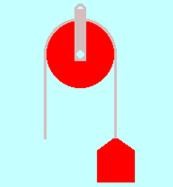
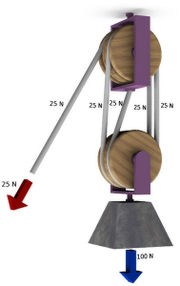
Algunas inventos que cumplen las condiciones anteriores son: cuchillo, pinzas, rampa, cuña, polea simple, rodillo, rueda, manivela, torno, hacha, pata de cabra, balancín, tijeras, alicates, llave fija...
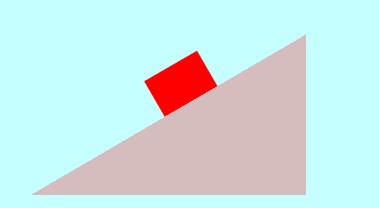
Las máquinas simples se pueden clasificar en tres grandes grupos que se corresponden con el principal operador del que derivan: palanca, plano inclinado y rueda.
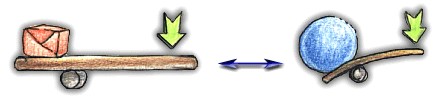
Palanca
|
DESCRIPCIÓN MÁQUINAS SIMPLES Y COMPLEJAS
Se denomina máquina a aquel dispositivo que nos dan la posibilidad de modificar la dirección y magnitud de la aplicación de una fuerza. Estamos hablando aquí de las máquinas simples, es necesario aclarar que en el mundo de las máquinas encontramos dos divisiones, las simples y las complejas. Los ejemplos de máquinas simples son: cables, ruedas, la palanca, entre otros; utilizando dichas máquinas de forma correcta podemos obtener una fuerza mucho mayor que la que un ser humano podría aplicar o tener sólo con la fuerza de su musculatura. A partir del hallazgo o creación de estas máquinas simples y sus combinaciones, surgieron entonces la de tipo complejas.
Las máquinas complejas están compuestas por diferentes elementos, entre los más importantes tenemos el motor, el cual funciona como una fuente que extrae energía, ésta última se necesitará para realizar el trabajo deseado. Es relevante señalar que el motor por sí mismo puede ser considerado una máquina, en este caso posee el objetivo de transforma energía (puede ser eléctrica, química, cinética, entre otros.) en energía mecánica. Luego tenemos el mecanismo, éste es considerado como todos los factores mecánicos en conjunto, dentro de ellos, los móviles serán los que están destinados a lograr el efecto que necesitamos de la máquina, estos se conoce como “efecto útil”, transformará la energía que proviene del motor